you’re probably tired of hearing me talk about movement, but listen up, this is important:
Info
Later note: the website for Yet Another Generic Swerve Library explains this 10 times better than me.
The purpose of kinematics1 is to convert between a universal ChassisSpeeds class (view docs) to multiple SwerveModuleState classes, which contains velocities and angles for each wheel of our drivetrain. SwerveDriveKinematics is the Writing to ChassisSpeeds will change the swerve module state and move our robot!
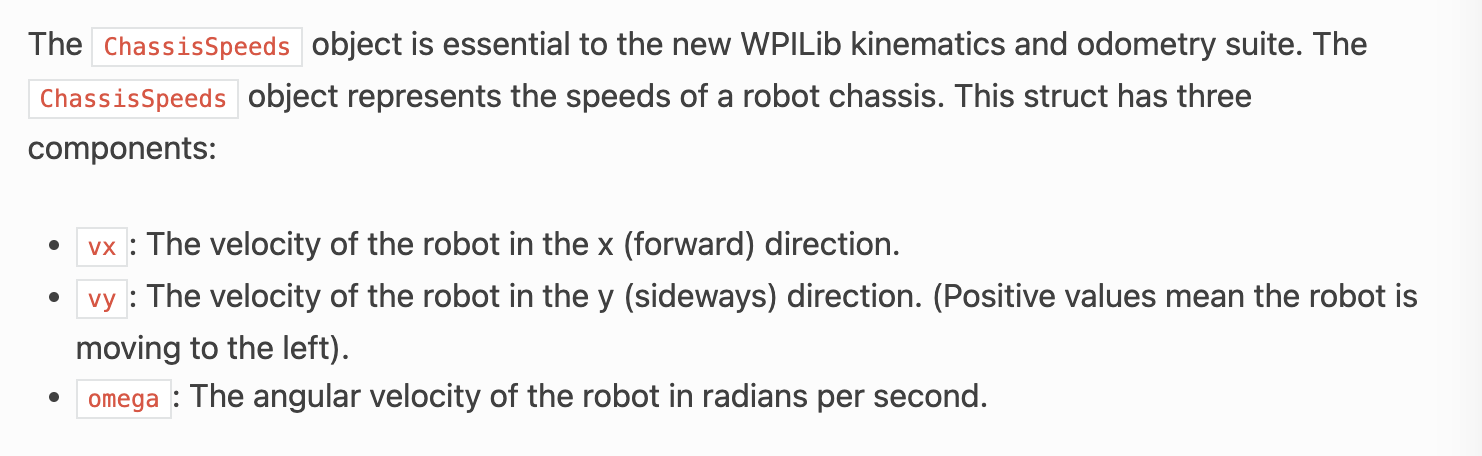
Want to know more about what ChassisSpeeds is? Here:
(From WPI’s Info about Chassis Speeds)
In the swerve drive subsystem, I used ChassisSpeeds to create a drive function:
(more info on how the code works here)
public void drive(double xSpeed, double ySpeed, double rot, boolean fieldRelative) {
var swerveModuleStates =
DriveConstants.kDriveKinematics.toSwerveModuleStates(
ChassisSpeeds.discretize(
fieldRelative
? ChassisSpeeds.fromFieldRelativeSpeeds(
xSpeed, ySpeed, rot, this.getRotation2d())
: new ChassisSpeeds(xSpeed, ySpeed, rot),
0.02)); // 0.02 = once per scheduler call
SwerveDriveKinematics.desaturateWheelSpeeds(
swerveModuleStates, DriveConstants.kTeleDriveMaxSpeedMetersPerSecond);
frontLeft.setDesiredState(swerveModuleStates[0]);
frontRight.setDesiredState(swerveModuleStates[1]);
backLeft.setDesiredState(swerveModuleStates[2]);
backRight.setDesiredState(swerveModuleStates[3]);
}The purpose of odometry is to use the robot’s sensors to estimate the pose of our robot. A pose is represented with the Pose2d class, and it consists of a translation and a rotation.
In the swerve drive subsystem, we create a SwerveDriveOdometry instance2 and update it in periodic() with the robot’s rotation and an array of swerve module positions:
(more info on how the code works here)
// Odometry class for tracking robot pose
SwerveDriveOdometry m_odometry =
new SwerveDriveOdometry(
DriveConstants.kDriveKinematics,
m_gyro.getRotation2d(),
new SwerveModulePosition[] {
m_frontLeft.getPosition(),
m_frontRight.getPosition(),
m_rearLeft.getPosition(),
m_rearRight.getPosition()
});
/** Creates a new DriveSubsystem. */
public DriveSubsystem() {}
@Override
public void periodic() {
// Update the odometry in the periodic block
m_odometry.update(
m_gyro.getRotation2d(),
new SwerveModulePosition[] {
m_frontLeft.getPosition(),
m_frontRight.getPosition(),
m_rearLeft.getPosition(),
m_rearRight.getPosition()
});
}Footnotes
-
Technically, I should be calling it inverse kinematics. Kinematics is using wheel angles to determine where our robot will go (SwerveModuleState → ChassisSpeeds), while inverse kinematics is using where we want our robot to go to determine the angles and speeds of our wheels (ChassisSpeeds → SwerveModuleState) This article titled What is Inverse Kinematics? is a nice run-down if you’re curious about inverse kinematics. ↩
-
We might switch to using a “pose estimator” instead of an odometry class after reading this WPI article about pose estimators. It integrates vision into odometry to give a more accurate pose. ↩